Studiewijzer module RTSYST
© Harry Broeders.
| onderwijseenheid: |
RTSYST: Real-time systemen |
| studiebelasting: |
3 CP = 84 SBU |
| semester / kwartaal: |
ECV/2 |
| contacturen: |
2 uur/week college, 1 uur/week begeleid practicum en 1 uur/week
onbegeleid practicum. |
| toetsing: |
practicumbeoordeling (O/V), schriftelijke toets (cijfer). |
| benodigde voorkennis: |
GESPRG, MICPRG en OGOPRG |
| verantwoordelijke docent: |
Harry Broeders |
Inleiding.
Software waarvan het resultaat niet alleen correct maar ook exact op
tijd moet zijn wordt real-time software genoemd. Vooral het begrip
voorspelbaarheid is erg belangrijk bij real-time systemen. Om het ontwikkelen
van real-time software eenvoudiger te maken wordt vaak gebruik gemaakt van een
Real-Time Operating System (RTOS). Veel embedded systemen bevatten real-time
software. Het is daarom van belang dat een elektrotechnisch ingenieur in staat
is om real-time software te ontwikkelen m.b.v. een RTOS.
Globale leerdoelen.
De beginnende elektrotechnische ingenieur die het vak RTSYST heeft gevolgd
is in staat om real-time software te ontwikkelen. Hij/zij is bekend met de
specifieke kenmerken van real-time systemen en kent verschillende
implementatievormen van real-time software.
Als je dit vak met een voldoende hebt afgesloten:
- Ken je de verschillende definities van real-time systemen, de
karakteristieke eigenschappen van real-time systemen en enkele voorbeelden
van real-time systemen.
- Ken je het verschil tussen processes en threads, weet je wanneer ze te
gebruiken en kun je ze gebruiken zowel in POSIX als in C++11.
- Kun je een concurrent programma in C (met POSIX) en in C++11
implementeren.
- Ken je de voor- en nadelen van de synchronisatie via gemeenschappelijk
geheugen versus synchronisatie via berichten.
- Kun je verschillende vormen van synchronisatie en communicatie via
gemeenschappelijk geheugen toepassen, te weten: mutexes, semaphores,
conditional critical regions en monitors.
- Kun je verschillende vormen van synchronisatie en communicatie via
berichten toepassen met behulp van POSIX messages.
- Kun je tijdvertragingen en tijdsynchronisatie toepassen in real-time
systemen.
- Ken je de verschillen tussen scheduling in een general purpose en in een
real-time OS.
- Ben je bekend met verschillende vormen van real-time scheduling.
- Weet je hoe je prioriteiten aan taken moet toekennen.
- Ken je het priority inversion probleem en de oplossingen daarvoor.
- Kun je blocking- en responsetijden uitrekenen.
Literatuur.
Benodigde hard- en software.
C++11, QNX (of een andere POSIX compatible RTOS).
Toetsing en beoordeling.
Er worden voor deze cursus twee resultaten vastgesteld die beide apart in
OSIRIS worden gezet: RTSYST-co1|real-time systemen (TOETS01) en
RTSYST-pr1|real-time systemen (TOETS02). Voor beide toetsen moet je
inschrijven! RTSYST-co1 is een schriftelijke toets in week 8 met een herkansing
in week 10, het resultaat is een cijfer (1..10). Bij het tentamen mag je
boeken, dictaten, oude toetsen en aantekeningen gebruiken. Het tentamen bestaat
uit open vragen. RTSYST-pr1 is een practicum beoordeling, het resultaat is een
O(nvoldoende) of een V(oldoende). Het practicum moet afgerond zijn in week 7.
In week 10 kan het practicum herkanst worden.
Op het practicum werk je in tweetallen. Kies een partner van ongeveer
hetzelfde niveau.
Het practicum wordt beoordeeld met Onvoldoende of Voldoende. Alle opdrachten
worden afzonderlijk beoordeeld met een voldoende of onvoldoende aan de hand
van:
- de antwoorden die je geeft op de in de opdracht gestelde vragen en een
demonstratie om de juiste werking van de software aan te tonen.
- een inhoudelijk gesprek over opzet en uitvoering van de implementatie.
Tijdens dit gesprek zal de docent enkele vragen stellen over de manier van
aanpak en/of de werking van het programma. Als je deze vragen (over je
eigen programma) niet kunt beantwoorden dan krijg je onvoldoende! Als bij
jou een opdracht met onvoldoende wordt beoordeeld krijg je 1 keer de kans
een vervangende opdracht te maken.
Om het practicum met een voldoende af te sluiten moeten alle
opdrachten voldoende zijn.
Weekplanning theorie.
Let op! Deze planning zal tijdens het geven van deze
onderwijsmodule nog worden aangepast!
Gedetailleerde planning theorie.
Week 1. Introductie, concurrent
programming met de nadruk op Pthreads.
- Boek: hoofdstuk 1:
- Inleiding, 1.1 t/m 1.3 bestuderen.
- 1.4 en 1.5 overslaan.
- Boek: hoofdstuk 4:
- hoofdstuk 4 t/m 4.3.3 bestuderen. Inleiding processen en threads.
- 4.4 overslaan. Ada wordt in Europa niet veel
gebruikt.
- 4.5 overslaan. Java wordt (bijna) nooit
gebruikt in real-time applicaties.
- 4.6 bestuderen. Threads in POSIX. Komt ook op het practicum aan de
orde. Zie voor meer info:
- 4.7 overslaan.
- 4.8 nu overslaan. Komt in week
4 aan de orde.
- 4.9 bestuderen.
- Programma's:
- Verplicht leesvoer:
- RTOS versus GPOS
 . In dit artikel uit Embedded
Computer Design van januari 2005 wordt heel duidelijk uitgelegd wat het
verschillen zijn tussen een RTOS (Real-Time Operating System) zoals QNX
en een GPOS (General Purpose Operating System) zoals Windows of Linux.
. In dit artikel uit Embedded
Computer Design van januari 2005 wordt heel duidelijk uitgelegd wat het
verschillen zijn tussen een RTOS (Real-Time Operating System) zoals QNX
en een GPOS (General Purpose Operating System) zoals Windows of Linux.
- Extra leesvoer:
Week 2. Shared variabele-based
synchronisation and communication.
- Boek: hoofdstuk 5:
- Inleiding, 5.1 en 5.2 bestuderen. De problemen bij gedeelde
variabelen, de noodzaak tot synchronisatie en de oplossing met behulp
van busy waiting.
- 5.3 overslaan. Het gebruik van suspend en
resume lost wel het efficiency probleem van busy waiting op maar leidt
tot critical races en is dus niet veilig.
- 5.4 t/m 5.4.4 bestuderen. Semaphoren.
- 5.4.5 en 5.4.6 overslaan.
- 5.4.7 bestuderen. Semaphoren in POSIX. Komt ook op het practicum aan
de orde.
- 5.4.8 bestuderen. Kritiek op semaphoren.
- 5.5 bestuderen. CCRs zijn een "opstapje" naar monitors.
- 5.6 bestuderen. Monitors.
- 5.7 bestuderen. POSIX mutex en conditionele variabelen.
- 5.8 overslaan. Protected objects worden in Ada
gebruikt.
- 5.9 overslaan. Java wordt (bijna) nooit
gebruikt in real-time applicaties.
- 5.10 en 5.11 overslaan.
- Programma's:
- Probleem met gedeeld geheugen: mutex_problem.c
 bijbehorende makefile en output.txt
bijbehorende makefile en output.txt  .
.
- Oplossing voor bovenstaand probleem met behulp van een mutex:
mutex_solution.c
bijbehorende makefile en output.txt .
- Dining Philosophers: dining_philosophers.c
met bijbehorende makefile.
- Oplossing van het Dining Philosophers probleem waarbij een
semaphore wordt gebruikt om er voor te zorgen dat er nooit meer
dan 4 filosofen tegelijkertijd gaan (proberen om te) eten: dining_philosophers.c
met bijbehorende makefile.
- Voorbeeld van het gebruik van een monitor die in POSIX
geïmplementeerd wordt met een mutex en conditionele
variabelen: teller.c bijbehorende makefile en output.txt .
- Oplossing van het Dining Philosophers probleem waarbij een
monitor (mutex in combinatie met een conditionele
variabele) wordt gebruikt om er voor te zorgen dat er nooit meer
dan 4 filosofen tegelijkertijd gaan (proberen om te) eten: dining_philosophers.c
met bijbehorende makefile.
- Oplossing van het Dining Philosophers probleem waarbij deadlock wordt
voorkomen door de volgorde waarin de vorken worden opgepakt te
variëren: dining_philosophers.c
met bijbehorende makefile.
Week 3.Concurrent
programming in C++11.
- Leerstof (niet verplicht):
- Zelf te bestuderen leerstof:
- Programma's (gebruik Microsoft Visual C++ 2013 of GCC4.8 met de optie
-std=c++11):
- Aanmaken van
threads in C++11 zonder
parameteroverdracht: main.cpp
 en bijbehorende output.txt .
en bijbehorende output.txt .
- Aanmaken van
threads in C++11 met parameteroverdracht:
main.cpp en bijbehorende output.txt .
- Eenvoudig programma dat de "hardware concurrency" laat zien: main.cpp .
- Voorbeeld van een class
Point die niet geschikt is om in
een multithreaded omgeving te gebruiken: main.cpp .
- De class
Point kan geschikt gemaakt worden om in een
multithreaded omgeving te gebruiken met behulp van een
mutex: main.cpp
.
- Later zul je leren dat het beter (en eenvoudiger) is om een
mutex in combinatie met een lock te
gebruiken.
- Een uitbreiding van de bovenstaande class
Piont die wel
correct werkt maar waarbij je (mogelijk) onnodig moet wachten: main.cpp .
- Om het bovenstaande "onnodig wachten" probleem op te lossen moet je
gebruik maken van
boost::shared_mutex (standaard C++11
kent geen shared_mutex) of
moet je zelf met behulp van een monitor een shared_mutex
implementeren (Zie onderstaande opgave!).
- De class
Point kan eenvoudiger en beter
(lees: exception safe) geschikt gemaakt worden om in een
multithreaded omgeving te gebruiken met behulp van een
mutex in combinatie met een lock_guard: main.cpp .
- Voorbeeld van het gebruik van een monitor die in C++11
geïmplementeerd wordt met een
mutex, een
condition_variable, een unique_lock en een
lock_guard: main.cpp en bijbehorende output.txt .
- Andere versie van het bovenstaande monitor programma, in
plaats van een simpele wait wordt nu een wait met een predicate
gebruikt. De predicate specificeert de conditie waarop door de
conditionele variabele gewacht wordt. In deze versie wordt een gewone
functie gebruikt om de predicate te specificeren: main.cpp .
- (niet verplicht) Nog een andere versie van het bovenstaande
monitor programma, in dit geval wordt een C++11
lambda
 functie
gebruikt om predicate te specificeren: main.cpp .
functie
gebruikt om predicate te specificeren: main.cpp .
- Voorbeeldprogramma dat eenvoudig concurrent gemaakt kan worden: main.cpp en de concurrent versie met
async:
main.cpp .
- Hetzelfde programma maar dan met gebruik van
auto: main.cpp .
- Hetzelfde programma waarbij de programmeur heeft aangegeven of er een
aparte thread gestart moet worden door
async: main.cpp .
- Voorbeedprogramma met
async en StopWatch
zodat je de snelheidswinst kunt meten (het programma werkt met gebruik
van async 2x zo snel): main.cpp .
- Voorbeeldprogramma dat laat zien wat het probleem is als meerder
theads dezelfde globale variabele gebruiken: main.cpp .
- Oplossing voor het bovenstaande probleem met behulp van een
mutex: main.cpp .
- Oplossing voor het bovenstaande probleem met behulp van een
mutex en een lock_guard: main.cpp .
- Oplossing voor het bovenstaande probleem met behulp van een
atomic: main.cpp .
- Opgaven C++11:
- Implementeer zelf een
shared_mutex class met de in C++11
beschikbare mutex en condition_variable.
- Uitwerking main.cpp met output.txt .
- Ander testprogramma main.cpp met output.txt dat laat zien dat lezers
ook toegang krijgen als er een schrijver staat te wachten.
- Uitwerking waarbij lezers geen toegang meer krijgen als er een
schrijver staat te wachten: main.cpp met output.txt .
- Implementeer zelf een
barrier class met de in C++11
beschikbare mutex en condition_variable.
- Uitwerking main.cpp
met output.txt .
- Ander testprogramma met gesynchroniseerde output main.cpp .
- Ander testprogramma zonder globale variabelen waarbij het aantal
threads door de gebruiker kan worden opgegeven main.cpp met output.txt (voor 20 threads).
- Aanbevolen literatuur: Blog
over C++11 threads
 .
.
- Extra (niet verplicht) leesvoer: C++ Concurrency in Action -
Practical Multithreading, Anthony Williams, February 2012, 528 pages,
ISBN: 9781933988771.
- Extra (niet verplicht) leesvoer: µC++ voegt
concurrency toe aan C++ door middel van taalconstructies (onder andere task
en monitor).
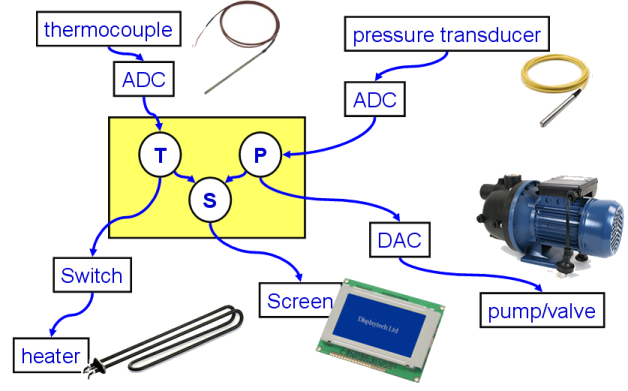
Week 4.Message-based synchronisation
and communication + voorbeeld van concurrent programming in een embedded
systeem.
- Boek: hoofdstuk 6:
- Inleiding, 6.1 en 6.2 bestuderen. Inleiding
messages.
- 6.3 t/m 6.6 overslaan.
- 6.7 bestuderen. POSIX messages. Zie: mqueue.h

- 6.8 overlaan.
- 6.9 overlaan.
- Boek: hoofdstuk 4:
- 4.8 probleembeschrijving bestuderen. A simple
embedded system.
- Programma's:
Week 5.Real-time facilities.
- Boek: hoofdstuk 9:
- Inleiding, 9.1 bestuderen. Inleiding
time.
- 9.2 tot 9.2.1 bestuderen. Inleiding clock.
- 9.2.1 tot 9.2.3 overslaan.
- 9.2.3 bestuderen. Clocks in POSIX. Zie
clock_xxx()
en time.h
. Zie ook: http://bd.eduweb.hhs.nl/micprg/time.htm
- 9.2.4 bestuderen, behalve Ada en Real-Time Java.
- 9.3 tot 9.3.2 bestuderen.
- 9.3.2 overslaan.
- 9.4 tot 9.4.2 bestuderen.
- 9.4.2 en 9.4.3 overlaan.
- 9.5 en 9.6 tot 9.6.1 bestuderen.
- 9.6.1 overslaan.
- Boek: hoofdstuk 7:
- 7.5.1 bestuderen. POSIX signals nodig voor het begrijpen van 10.4.2,
13.2.3 en 13.3.1.
- Boek: hoofdstuk 10:
- 10.4.2 bestuderen. Time-triggered events in C/Real-Time POSIX.
- Boek: hoofdstuk 13:
- 13.2 en 13.2.3 bestuderen. Deadline overrun detectie.
- 13.3 en 13.3.1 bestuderen. Maximum execution time overrun detectie.
- Programma's:
- Voorbeeld van het gebruik van een monitor die in POSIX
geïmplementeerd wordt met een mutex en conditionele variabelen waarbij
een
pthread_cond_timedwait wordt gebruikt: teller.c bijbehorende makefile en output.txt .
- Voorbeeld van het gebruik van een monitor die in C++11
geïmplementeerd wordt met een
mutex, een
condition_variable, een unique_lock en een
lock_guard waarbij een wait_for wordt
gebruikt: main.cpp en bijbehorende output.txt .
Week 6 en 7.Scheduling.
- Boek: hoofdstuk 11:
- Inleiding, 11.1 tot 11.6.2 bestuderen.
- 11.6.2 overslaan.
- 11.7 t/m 11.9 bestuderen. Het priority inversion probleem dat in 11.8
wordt besproken is zelf op de planeet Mars al eens opgetreden. Zie http://www.youtube.com/watch?v=lyx7kARrGeM.
- 11.10 t/m 11.16 overslaan.
- Opgaven 1, 2, 4, 5, 6 en 7 maken. Probeer het eerst zelf en
controlleer jezelf met behulp van mijn uitwerkingen.
- Extra opgave: Oefenopgave
RTSYST FPS-RMPA.pdf .
- Extra leesvoer:
Weekplanning practicum.
De practicumopgaven worden in groepjes van 2 studenten uitgevoerd. Het is de
bedoeling dat je ongeveer 4 uur/week aan dit practicum besteedt. Als je bij het
werken aan het practicum tegen problemen aanloopt waardoor je niet verder kunt
wacht dan niet tot het ingeroosterde uur maar stuur een mailtje naar J.Z.M.Broeders@hhs.nl.
| week |
opdracht |
studiemateriaal |
onderwerp |
| 1 |
opdracht 1 |
Theorie van week 1. |
Inleiding QNX. |
| 2 |
opdracht 2 a t/m d |
Theorie van week 2 |
Multi-threaded programmeren in POSIX met shared
memory-based synchronisation and communication. |
| 3 |
opdracht 2 e |
| 4 |
opdracht 3 |
Theorie van week 3. |
Multi-threaded programmeren in C++11. |
| 5 |
opdracht 4 |
Theorie van week 4.- |
Multi-threaded programmeren in POSIX met message-based
synchronisation and communication. |
| 6 |
opdracht 5 |
Theorie van week 6. |
Tool voor schedulability analysis. |
| 7 |
- |
- |
Uitloop. |



{kind=link}