 |
 |
Webinar Overview: SystemC has become well-established as the language of choice for system modeling and virtual platform creation and integration, and is now being applied successfully for high level synthesis. SystemC models also frequently appear as reference models in the hardware verification flow. This session is aimed at hands-on hardware or software engineers who might know Verilog or C but have no previous experience of SystemC. It will explain what you need to know to be successful with SystemC by exploring some fundamental questions including: What is SystemC and how is it used? What does modern SystemC code look like? What use cases best fit SystemC? What is TLM? Where can I learn more?
- Les 1
 :
:
Overzicht van de minor Embedded Systems en een oproep om je C++ kennis (indien nodig) op te halen. Zie Object Georiënteerd Programmeren in C++. - Les 2:
In deze les leg ik uit hoe je in SystemC systemen op verschillende abstractieniveau's kunt beschrijven. Een systeembeschrijving bestaat uit een beschrijving van de functionaliteit (het gedrag) en van de structuur (hierarchy) van het systeem. In SystemC wordt het gedrag beschreven met behulp van de jullie bekende C++ constructies: beslissing, herhaling, functie, class enz. Voor het beschrijven van de hierarchy van een systeem maakt SystemC gebruik van modules. Een systeem bestaat in een SystemC model altijd, op elk abstractieniveau, uit modules. Een module beschrijft een subsysteem en kan dus zelf ook weer bestaan uit modules. Een module kan via poorten communiceren met de wereld buiten de module. Poorten kunnen met elkaar verbonden worden met behulp van channels. In de onderstaande tabel heb ik voor verschillende abstractieniveaus aangegeven wat de modules en channels op dit abstactieniveau modelleren. Modules worden in SystemC op elk abstractieniveau geïmplementeerd met behulp van de SystemC library classsc_module. Channels worden in SystemC geïmplementeerd met verschillende classes uit de SystemC library afhankelijk van het abstactieniveau.
Abstractieniveau modules modelleren: channels modelleren: SystemC class(es) voor channel(s) Gate Level (poort niveau). Dit is het laagste abstractieniveau dat in SystemC beschreven kan worden. Het wordt gebruikt voor het modelleren van hardware. Het systeem bestaat op dit abstractieniveau uit logische poorten (and, or, inverter, enz). Elektrische verbinding (metaalspoortje of draadje) sc_signal<sc_logic>
sc_signal<bool>
sc_buffer<sc_logic>
sc_buffer<bool>Register Transfer Level (RTL). Dit abstactieniveau wordt vaak gebruikt voor het modelleren van hardware maar kan ook gebruikt worden om software op een heel laag abstractieniveau (assembler) te beschrijven. Het systeem bestaat op dit abstractieniveau uit registers, optellers, vermenigvuldigers, schuifregisters, tellers, multiplexers enz. Elektrische verbinding of groepjes van deze verbindingen (bussen). sc_signal<...>
sc_buffer<...>Behavioural Level. Dit is een abstractieniveau boven RTL waarin de nadruk ligt op het beschrijven van het gedrag (en niet op het beschrijven van de structuur). Dit kan zowel gebruikt worden voor het modelleren van hardware als voor het modelleren van software. Het systeem bestaat op dit abstractieniveau uit modules boven het RTL niveau. De onderliggende structuur van deze modules wordt niet gemodelleerd. Op dit niveau kunnen allerlei soorten channels gebruikt worden. De SystemC library bevat een aantal zogenoemde primitive channels maar het is ook mogelijk om zelf andere soorten primitieve channels of om zelf zogenoemde hierarchical channels te implementeren. sc_signal<...>
sc_buffer<...>
sc_mutex
sc_semaphore
sc_fifo<...>Transaction Level Modelling. Op dit abstractieniveau wordt de architectuur van de hardware beschreven. Het systeem bestaat op dit abstractieniveau uit processing elements, geheugens en I/O devices die via één of meerdere bussen met elkaar zijn verbonden. De informatieoverdracht over deze bussen wordt beschreven met behulp van transacties. In de SystemC standaard is een speciaal deel opgenomen voor het modelleren van dit soort modellen: SystemC TLM2 simple_initiator_socket<...>
simple_target_socket<...>
...Functional Level: Asynchronous Message Passing. Op dit abstratieniveau wordt het systeem beschreven als een verzameling processen die met elkaar communiceren via ongelimiteerde FIFO's. Dit kan zowel gebruikt worden voor het modelleren van hardware als voor het modelleren van software. Het systeem bestaat op dit abstractieniveau uit processen. Deze kunnen later in software worden geïmplementeerd als processen/threads/tasks in een operating systeem of als processoren/processing elements in hardware. FIFO's. Dezen kunnen later in software geïmplementeerd worden als pipes/message channels/TCP verbindingen enz .of in hardware als hardware FIFO's. sc_fifo<...>Functional Level: Algorithm Description. Dit is het hoogste abstractieniveau waarin alleen de functionaliteit van de hard- en/of software wordt beschreven. Op dit abstractieniveau bestaat het hele systeem uit één module. Er zijn op dit abstractieniveau geen channels - Het gedrag van een module wordt beschreven in SystemC processen. Deze processen moeten bij de simulatiekern van SystemC geregistreerd worden (call backs). Bij deze registratie moeten ook de events worden opgegeven waarop het proces moet reageren. Deze events zijn afkomstig van de channels waarmee de poorten van de modules verbonden zijn.
Sheet 1 t/m 10 van de TUDelft. In de traditionele manier van het ontwikkelen van embedded systems werd eerst de hardware ontworpen.
Sheet 11 t/m 21 van de TUDelft slaan we over omdat ik ervan uitga dat jullie C++ kennis voldoende is. Zie anders Object Georiënteerd Programmeren in C++.
Sheet 11 t/m 21 bevatten bovendien enkele foutjes:
Sheet 12:#include <assert.h>moet zijn#include <cassert>.
Sheet 14: De constructor en destructor kunnen netter worden gecodeerd:
Image(): width(0), height(0), data(nullptr) { /* use initialisation list */ } ~Image() { delete[] data; /* it is safe to call delete[] on a null pointer */ }Sheet 16: De constructor kan netter worden gecodeerd:
Image(int w, int h): width(w), height(h), data(new Vec3f[w*h]) { }Sheet 16:
Image myImage = Image(10, 10);moet zijnImage myImage(10, 10);.
Sheet 17: Het prototype van de copy constructor is nietImage(Image *img)maarImage(const Image& img). Alle pijlen (->) moeten punten (.) zijn. Ook kan het netter door de initialisatielijst van de constructor te gebruiken:
Image(const Image& img): width(img.width), height(img.height), data(new Vec3f[img.width * img.height]) { for (int i = 0; i < width * height; ++i) data[i] = new data[i]; }Sheet 17: "usually" moet zijn "sometimes". Zie paragraaf 5.7 van het dictaat: Objectgeoriënteerd Programmeren in C++: Dictaat_OGPiCpp.pdf.
Sheet 20: De default constructor van de basisklasse wordt automatisch aangeroepen in de constructor van een afgeleide klasse. De constructor vanSpherekan dus netter als volgt worden gecodeerd:
Sphere::Sphere() : radius(1.0) { } - Les 3 :
In het verleden (<2013) gebruikte ik de sheets van de TUDelft om uit te leggen hoe je SystemC kan gebuiken om hardware op RTL- of poortniveau te beschrijven. Ik denk dat het goed is om dat aan de hand van een aantal voorbeelden te doen. In de laatste versies (>=2013) van de sheets van de TUDelft is echter voor een heel abstracte aanpak gekozen. Zie Sheet 22 t/m 41 van de TUDelft. In de (abstracte) voorbeeldcode is er ook voor gekozen om veel "onderdelen" dynamsich aan te maken wat in mijn ogen nodeloos complex is. Ook het "simple example" op sheet 32 t/m 41 is volgens mij verre van simpel. Om deze reden heb ik besloten om een eigen presentatie te maken gebaseerd op de oude presentatie van de TUDelft.De SystemC processen die in deze sheets gebruikt worden om het gedrag van de modules te beschrijven zijn
SC_METHODenSC_THREAD. Deze worden later (hoofdstuk 4 van de sheets van de TUDelft) nog uitgebreid behandeld. Voor nu is het voldoende om te weten dat een alsSC_MODULEgeregistreerde memberfunctie telkens opnieuw, door de SystemC simulatiekern, wordt aangeroepen als een event optreedt dat in de bijbehorende sensitivity list is gespecificeerd. Het uitvoeren van deze memberfunctie kan niet onderbroken worden door de SystemC simulatiekern. Een alsSC_THREADgeregistreerde memberfunctie daarintegen wordt slechts één maal, door de SystemC simulatiekern, aangeroepen. In deze memberfunctie is het mogelijk om de uitvoering tijdelijk te onderbreken (suspend) door de simulatiekern aan te roepen via dewaitfunctie. Er bestaan diverse overloaded versies van deze functie waarmee je op verschillende soorten events kunt wachten. De memberfunctie diewaitheeft aangeroepen wordt weer vervolgd (resumed) als het event, waarop gewacht wordt, is opgetreden. In de voorbeelden wordt dit gebruikt om een bepaalde tijd te wachten.SystemC voorbeelden:
- Model van een
1-bit (full)adder inclusief testbench.
 versie 1.
versie 1. - Model van een
1-bit (full)adder inclusief testbench. versie 2: zonder
(overbodige) lokale variabelen in de
SC_METHOD(add). - Model van een
1-bit (full)adder inclusief testbench. versie 3: met gebruik van
impliciete type conversies en operator overloading in
SC_METHOD(add). Ik raad het gebruik van deze stijl af omdat het naar mijn idee het verschil tussen variabelen en in- of uitgangen maskeerd.
- Model van een
1-bit (full)adder inclusief testbench.
- Les 4 :
Vervolg SystemC modules en hierarchie en bespreken van de SystemC datatypes.
Sheet 66 t/m 70 van de TUDelft behandelen de belangrijkste SystemC datatypes. Meer informatie over hetsc_logicdatatype kun je hier vinden: http://www.asic-world.com/systemc/data_types2.html. Daar kun je ook vinden hoe de logische operatoren (and, or en not) voor dit datatype gedefinieerd zijn.
In de les heb ik het belang en de principes van fixed-point getallen en berekeningen uitgelegd. We gaan dit bij de practicumopdrachten gebruiken. Algemene informatie over fixed point getallen kun je hier vainden: http://en.wikipedia.org/wiki/Fixed-point_arithmetic . In het
SystemC boek worden de fixed-point datatypes behandeld in paragraaf
4.5. Je kunt ook deze presentatie van Yves Vanderperren bekijken: fixed_point.pdf
. In het
SystemC boek worden de fixed-point datatypes behandeld in paragraaf
4.5. Je kunt ook deze presentatie van Yves Vanderperren bekijken: fixed_point.pdf  . In de SystemC standaard worden de
fixed-point datatypes behandeld in paragraaf 7.10.
. In de SystemC standaard worden de
fixed-point datatypes behandeld in paragraaf 7.10.
SystemC voorbeelden:
- Les 5:
Sheet 42 t/m 65. Processen, Events en Tijd.
Sheet 50 gebruikt een deprecated (lees: oude)
manier om de sensitivity van een proces op te geven. De SystemC
standaard zegt: "operator()of classsc_sensitiveis deprecated. Useoperator<<instead". De regel sensitive(fillup_request);moet dus vervangen worden doorsensitive << fillup_request;
Sheet 52 bevat twee kleine foutjes:"Calculated"moet zijn"Calculated "enmytimemoet zijnmy_time. Het doel van de voorbeeldcode is mij niet duidelijk.
Sheet 57 staat achter het prototype vanwait"triggers an event". Dat moet natuurlijk zijn: "waits for an event". Het voorbeeld is erg vreemd. Er staat// assume previous slidemaar op de sheet ervoor komt helemaal geenmy_eventvoor. - Les 6:
Sheet 71 t/m 91. Interfaces, Channels en Ports. Dit wordt in een zodanig tempo behandeld dat het wel nodig zal zijn om een en ander zelf thuis in het boek nog eens op te zoeken en te bestuderen!SystemC voorbeelden:
- Les 7 en Les 8 :
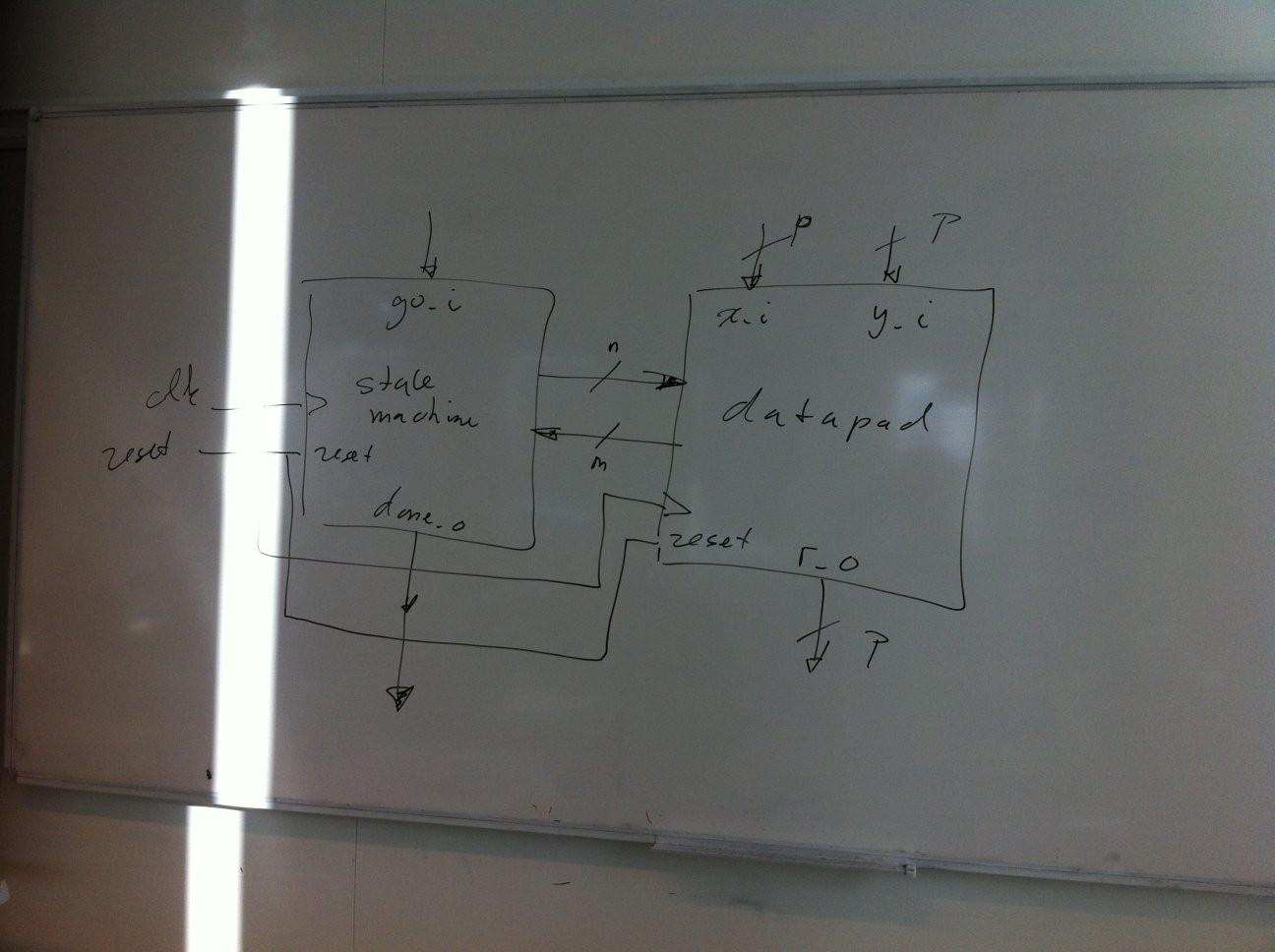
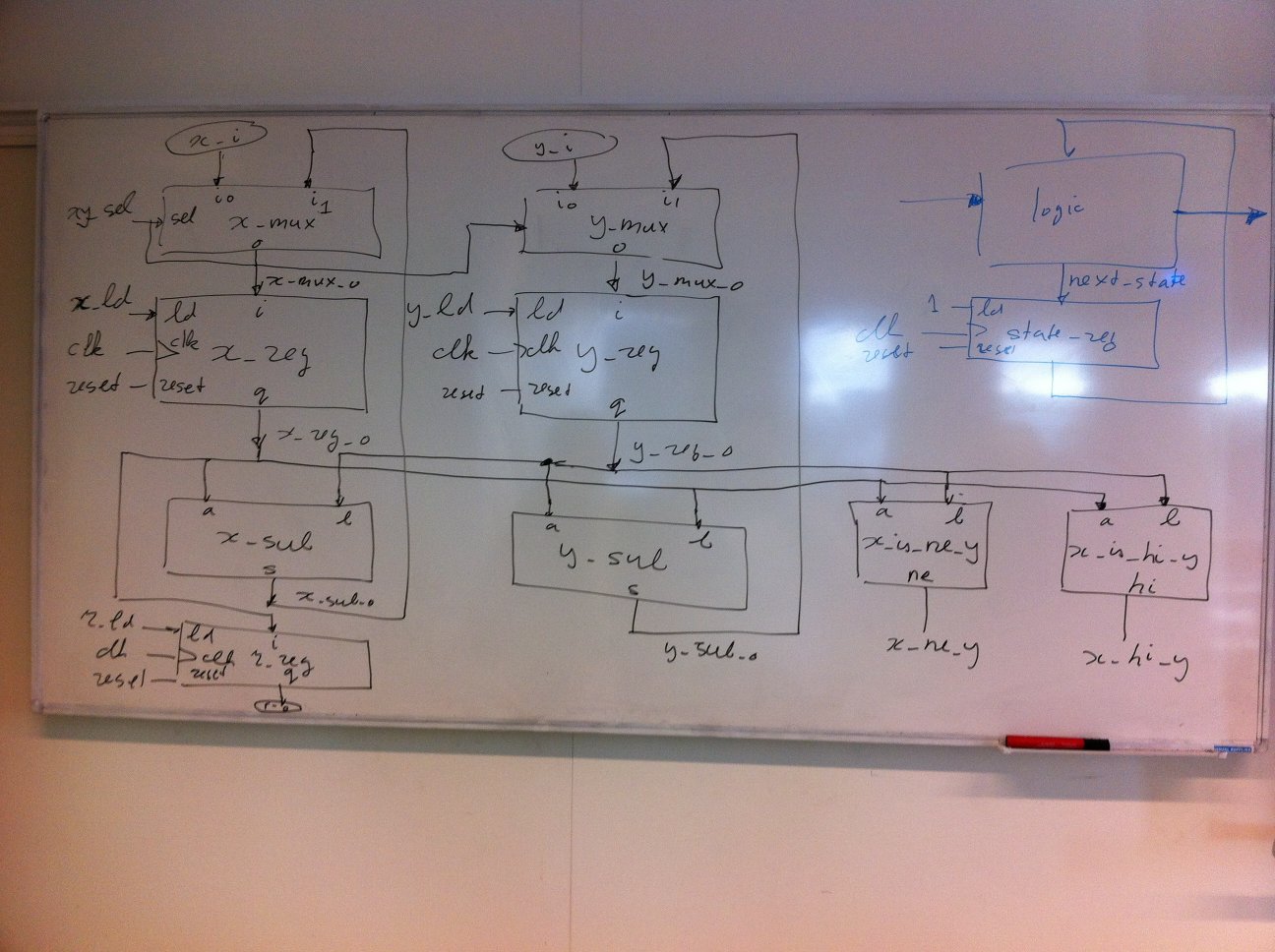
In deze lessen wordt aan de hand van een voorbeeld besproken hoe een functional level SystemC model verfijnt kan worden in een RTL SystemC model.
Zie ook: http://ens.ewi.tudelft.nl/Education/courses/et4054/ch4.pdf.
Meer informatie over Euclid's Algorithm: http://en.wikipedia.org/wiki/Euclidean_algorithm.
Normaal maak ik geen gebruik van het whiteboard. In les 8 gebruik ik maar liefst 2 borden! Zie: bord_rechts.jpg en bord_links.jpg.
Een snellere methode kun je hier vinden: http://en.wikipedia.org/wiki/Binary_GCD_algorithm. Oefening: Herhaal les 7 en 8 voor dit algoritme.SystemC voorbeelden:
- Les 9 :
In deze les wordt de SystemC synthesizer Fossy kort besproken. Een synthetiseerbaar cycle accurate model van een special function processor die de gcd van 2 getallen kan uitrekenen kun je hier vinden: input.cpp. Voor de liefhebbers: De door Fossy geproduceerde VHDL code die dit model implementeerd is: gcd.vhdl deze code maakt gebruikt van deze library: osss_pkg.vhdl.
In deze les wordt ook de Preformance Counter besproken die je in het practicum moet gebruiken voor het timen van je programma. Vervolgens zullen we de C2H tool van Altera gebruiken om een software functie (gcd) automatisch om te zetten naar hardware.
Documentatie van de preformance counter: http://www.altera.com/literature/hb/nios2/qts_qii55001.pdf.
C2H User Guide: http://www.altera.com/literature/ug/ug_nios2_c2h_compiler.pdf.
White paper: Automated Generation of Hardware Accelerators With Direct Memory Access From ANSI/ISO Standard C Functions: http://www.altera.com/literature/wp/wp-aghrdwr.pdf. - Les 10 :
In deze les wordt de standaard SystemC channelsc_fifobesproken. Eensc_fifokan gebruikt worden om modules met elkaar te laten communiceren. Dit kan dan later als een hardware fifo of als een software fifo worden geïmplementeerd. We kunnen eensc_fifoook gebruiken om threads met elkaar te laten communiceren. Dit kan dan later als software geïmplementeerd worden (b.v. als een message queue in een POSIX compatible Real-Time OS of als een Queue in FreeRTOS). Tot slot wordt in deze les uitgelegd hoe je zelf een channel kunt definiëren en gebruiken. Om zelf een channel te definieren moet je:- een read interface en een write interface definiëren. Een
zelfgedefinieerde interface moet virtual overerven van de
base class
sc_interface. Zie de SystemC standaard pagina 117 en 118:
An interface proper is an abstract class derived from classsc_interfacebut not derived from classsc_object. An interface proper contains a set of pure virtual functions that shall be defined in one or more channels derived from that interface proper. An interface proper shall obey the following rules:
a) It shall be publicly derived directly or indirectly from classsc_interface
b) If directly derived from classsc_interface, it shall use thevirtualspecifier
In de les zal ik kort uitleggen wat het verschil is tussen "gewoon" overerven en virtual overerven. Meer info kun je hier vinden: http://en.wikipedia.org/wiki/Virtual_inheritance. Nog
meer details vind je hier: http://www.parashift.com/c++-faq-lite/multiple-inheritance.html.
- een module afleiden van
sc_channel. Deze module moet de interfaces implementeren. De typenaamsc_channelis slechts een andere naam voor het typesc_module. Het typesc_channelis in de SystemC library als volgt gedefinieerd:typedef sc_module sc_channel;
- In een module kun je via een port van het type
sc_port<read interface>de functies die gedefinieerd zijn in de read interface en geïmplementeerd zijn in de channel aanroepen. Bijvoorbeeldout->read(c). Let op:out.read(c)is niet correct (de classsc_portheeft helemaal geenreadfunctie) en geeft een compilatiefout. Deoperator->is overloaded in de classsc_port<read interface>en geeft een pointer terug naar de read interface van de channel waar de port mee verbonden is. - In een module kun je via een port van het type
sc_port<write interface>de functies die gedefinieerd zijn in de write interface en geïmplementeerd zijn in de channel aanroepen. Bijvoorbeeldout->write(c). Let op:out.write(c)is niet correct (de classsc_portheeft helemaal geenwritefunctie) en geeft een compilatiefout. Deoperator->is overloaded in de classsc_port<write interface>en geeft een pointer terug naar de write interface van de channel waar de port mee verbonden is.
SystemC voorbeelden:
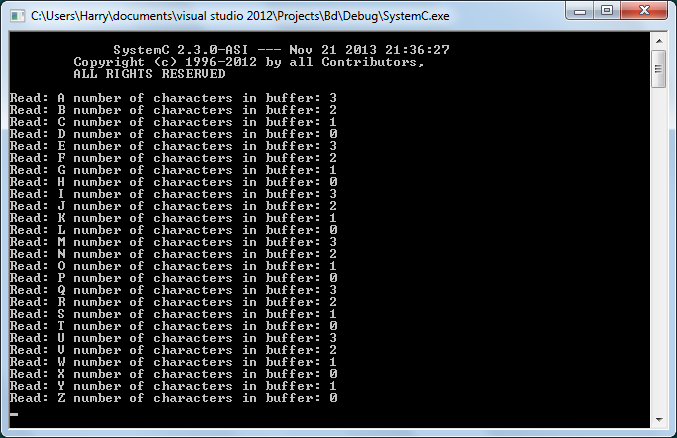
- Voorbeeld van een untimed model
waarin een producer en een consumer module met elkaar communiceren
(en synchroniseren) via een
sc_fifo. In dit
voorbeeld is geen timing gebruikt. De fifo wordt dus steeds
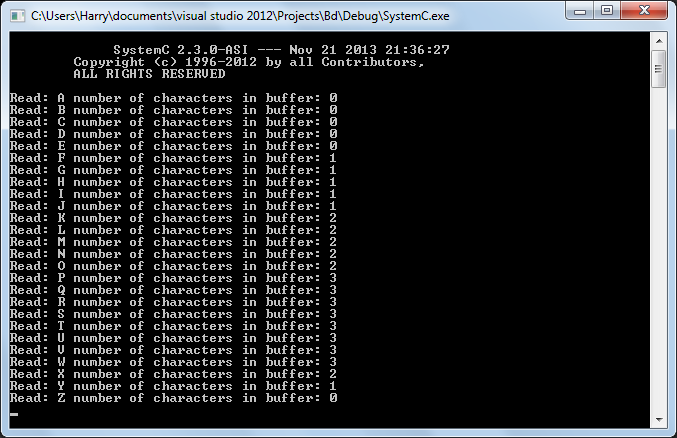
helemaal volgeschreven en daarna helemaal leeggelezen. Zie fifo_output.png. - Voorbeeld van een timed
model waarin een producer en een consumer module met elkaar
communiceren (en synchroniseren) via een
sc_fifo. In dit
voorbeeld is wel timing gebruikt. De producer is net een beetje
sneller dan de consumer. De fifo loopt dus langzaam vol. Zie fifo_tim_output.png.
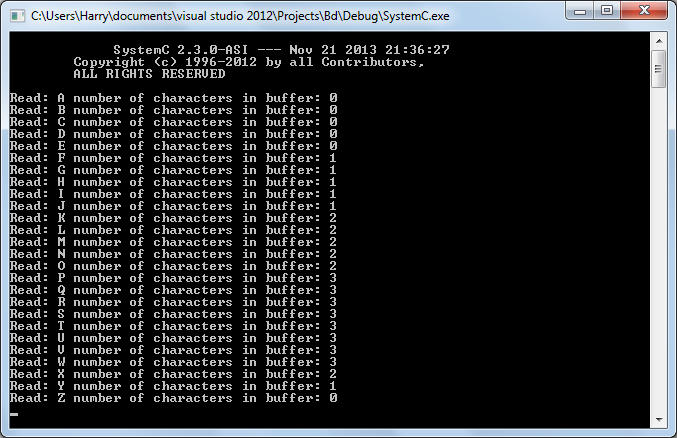
- Voorbeeld van een timed
model waarin een producer en een consumer
SC_THREAD(binnen dezelfde module) met elkaar communiceren (en synchroniseren) via eensc_fifo. In dit voorbeeld is
timing gebruikt. De producer is net een beetje sneller dan de
consumer. De fifo loopt dus langzaam vol. Zie fifo_tim_proc_output.png.
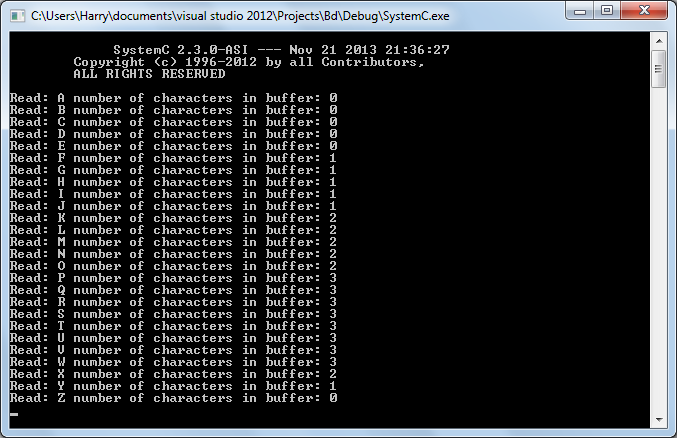
- Voorbeeld van een timed model
waarin een producer en een consumer module met elkaar communiceren
(en synchroniseren) via een zelfgemaakte class
fifo. In dit voorbeeld is timing gebruikt. De producer is
net een beetje sneller dan de consumer. De fifo loopt dus langzaam
vol. Zie my_fifo_tim_output.png.
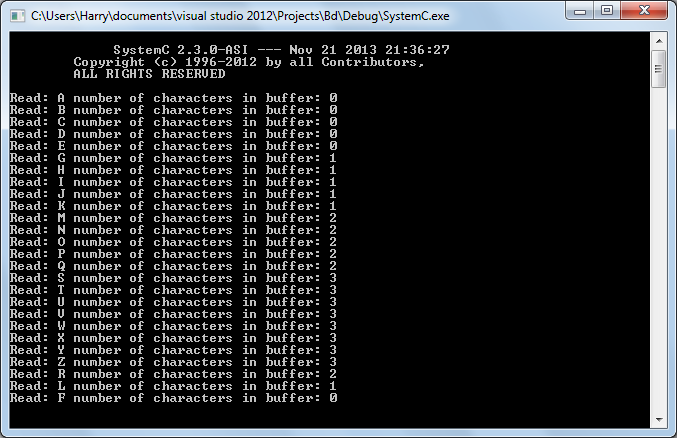
- Uitwerking huiswerk. Probeer eerst zelf het
huiswerk te maken! Implementatie van een channel genaamd
pqdie zich net zo gedraagt als eensc_fifomaar waarbij bij een read het grootste element (dat zich in de queue bevindt) wordt teruggegeven. Voorbeeld van een timed model waarin een producer en een consumer module met elkaar communiceren (en synchroniseren) via de zelfgemaakte classpq. De producer is
net een beetje sneller dan de consumer. De fifo loopt dus langzaam
vol. Zie pq_output.png.
- een read interface en een write interface definiëren. Een
zelfgedefinieerde interface moet virtual overerven van de
base class
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Les 11 en 12
:
In deze lessen wordt een introductie gegeven van Transaction Level Modeling (TLM) 2.0. Dit is een uitbreiding van SystemC die bedoeld is om modellen sneller te maken en interoperabiliteit te verkrijgen/verhogen. De link hierboven verwijst naar een door mij aangepaste (uitgeklede) presentatie. De originele presentatie kun je hier vinden.
Alle details kun je vinden in hoofdstuk 9 t/m 16 van de SystemC standaard (IEEE 1666-2011): 1666-2011.pdf.
Deze pagina is zeker het bekijken waard: http://www.doulos.com/knowhow/systemc/tlm2/. De op deze pagina gegeven tutorial (waarvoor je jezelf moet registreren) kun je ook hier downloaden (zonder jezelf te registreren):- systemc/tlm2_getting_started_1.pdf
systemc/tlm2_getting_started_1.cpp
- systemc/tlm2_getting_started_2.pdf
systemc/tlm2_getting_started_2.cpp
- systemc/tlm2_getting_started_3.pdf
systemc/tlm2_getting_started_3.cpp
- systemc/tlm2_getting_started_4.cpp
- systemc/tlm2_getting_started_5.cpp
- systemc/tlm2_getting_started_6.cpp
- systemc/tlm2_getting_started_1.pdf
- Les 13 en 14: Gastcollege. Dit jaar is er geen gastcollege over SystemC maar wel een gastcollege van Verum over model driven software development en Formele Verificatie. Bij de toets HM-ES-th1 kunnnen vragen over dit gastcollege worden gesteld.
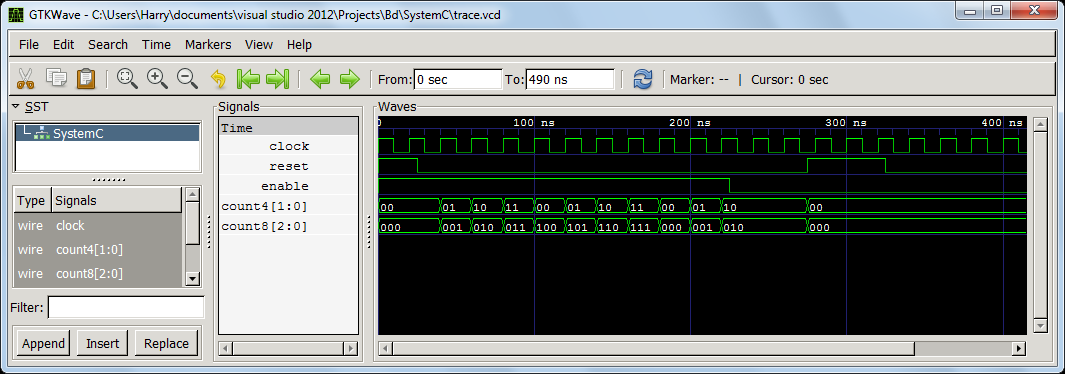
- Behavioral model van een
N-bit counter. Timing diagram: N-bit-counter_output.png.
- Structural model van een
N-bit counter. De structuur van een synchrone N bit counter opgebouwd met
D flip-flops is erg regelmatig. Zie: http://teahlab.com/4-bit_counter_modulo-16_D_flipflop/.
Het timing diagram is gelijk aan het bovenstaande timing diagram.
- Voorbeeld van het gebruik van
sc_mutex.
De uitvoer zonder en met mutex: systemc/progs/mutex_zonder_output.png
en systemc/progs/mutex_met_output.png.
{kind=link}
{kind=link}
{kind=link}